

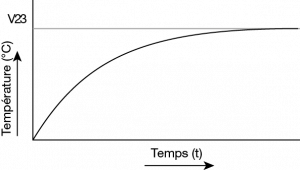
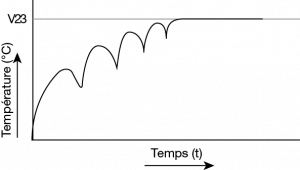
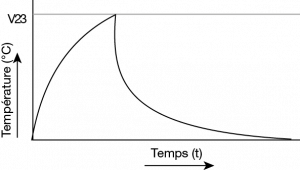
a. Courbe croissante : appropriée pour travailler avec un ressort
b. Courbe horizontale : appropriée pour travailler avec des efforts constants
c. Courbe décroissante : uniquement sur demande
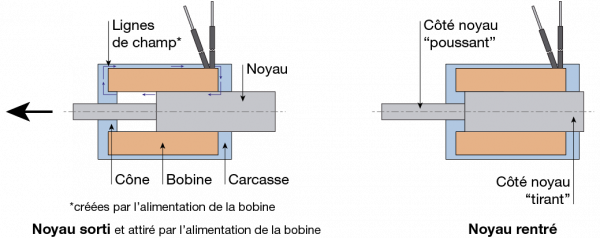
Fonction du noyau :
La plupart des électro-aimants sont équipés d’un noyau traversant l’appareil.
Lors du déplacement de ce noyau, il y a donc un côté tirant et un côté poussant.
Les 2 côtés peuvent être utilisés pour assurer une fonction.
Tension, intensité et puissance :
Tension nominale (Un) :
La tension d’alimentation (en V) définie pour l’électro-aimant.
La tolérance acceptable sur la tension d’alimentation nominale pour les électro-aimants est de +5% et de -10% pour obtenir les forces des courbes.
Surexcitation :
Une surexcitation de la bobine par surtension, pendant la durée de déplacement du noyau, permet de réduire jusqu’à 4 fois la durée d’attraction à vide.
Cette surtension, lorsque le circuit magnétique l’accepte, peut aller jusqu’à 4 fois la tension nominale.
Le facteur de marche devra être recalculé (nous consulter et voir les informations sur le Facteur de Marche).
Nous proposons une carte électronique de surexcitation.
Intensité nominale (In courant continu) :
Intensité (en A) consommée par la bobine à une température de 20oC et à une tension nominale (Un). L’intensité nominale est calculée en divisant la puissance consommée (Pn en W) par la tension nominale (Un en V).
Pour déterminer le courant maxi consommé par l’électro-aimant utiliser les formules suivantes :
![]()
-P : puissance (en W).
-I : intensité (en A) – Variable en fonction de la température et de l’alimentation.
-U : tension mini (en V) – Variable en fonction de l’alimentation.
-R : résistance (en Ω) – Variable en fonction de la température.
Puissance nominale (Pn) consommée :
Puissance absorbée (en W) de la bobine à la tension nominale et à une température de bobine de 20°C. Elle est calculée en multipliant la tension nominale (Un en V) par l’intensité nominale (In en A).
Économie d’énergie :
Pour ce qui est de notre carte électronique, elle permet de réduire considérablement la consommation d’un électro-aimant. Un électro-aimant peut également être étudié avec une double bobine pour diminuer le courant ; dans ce cas, une bobine est destinée à l’appel du noyau et l’autre bobine au maintien de celui-ci (pour cette 2 e bobine, le courant consommé sera donc nettement plus faible).
Résistance électrique :
Résistance électrique de la bobine à 20°C (en Ohm : Ω) – Tolérance de fabrication : ±10%.
Evolution de la résistance électrique de la bobine en fonction de la température ambiante :
L’intensité de la bobine est fonction de la résistance ohmique de celle-ci.
La résistance Ohmique Ω d’un conducteur électrique varie avec la température ainsi :
![]()
-R ( ) : résistance (en Ω) à température donnée.
-R0 : résistance (en Ω) à 20°C.
-0,004 : coefficient lié à l’évolution de la résistance électrique du cuivre avec la température.
-∆ : différence de température en °C entre 20°C et la température dans la bobine.
Tenir compte de cette évolution dans la formule de calcul du courant
– I : intensité (en A).
– P : puissance électrique (en W).
– R : résistance (en Ω) de la bobine
Par exemple, un électro-aimant d’une résistance de 10 Ohm à 20°C aura 9,2 Ohm à 0°C et 12,4 Ohm à 80°C ambiant.
A noter aussi que la mise sous tension de la bobine implique un cycle d’échauffement entraînant une diminution du courant.
Schéma de câblage :
De nombreuses possibilités existent, toutefois nous vous conseillons le câblage avec diode et résistance en parallèle. En effet, la coupure de la bobine alimentée provoque un pic de tension sur l’interrupteur de commande générant ainsi un arc électrique qui peut détériorer différents composants. Ce phénomène est lié à la self de la bobine.
Le câblage ci-dessous permet de limiter cet arc.
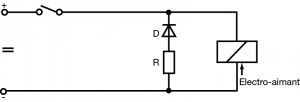
R(Ohm) = 7 * R(Ohm) de la bobine
Ce câblage permet aussi de limiter la durée de retour du noyau.
Cycles de fonctionnement :
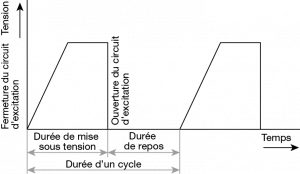
Période sous tension :
Durée entre la mise sous tension et la coupure de la tension de la bobine.
Période sans tension :
Durée entre la coupure de la tension et la mise sous tension de la bobine.
Facteur de marche (FM) :
Le facteur de marche (en%) correspond à un rapport entre les durées de mises sous tension de l’électro-aimant (Du) et la durée de référence (Dt) à +35°C.
Du : durée totale effective maximum d’alimentation sur une durée de référence (Dt).
Dt : durée de référence, définie par notre usine, pour chaque appareil (entre 2 et 5 min)
Calcul du facteur de marche :
![]()
Exemple : Du = 2 min réellement alimentées sur une période (Dt) de 5 min pour
l’appareil / Dt = 5 min > FM = 2/5 x 100 = 40%
Évolution du facteur de marche en fonction de la température ambiante :
Si la température ambiante est différente de +35°C le tableau suivant est à appliquer :
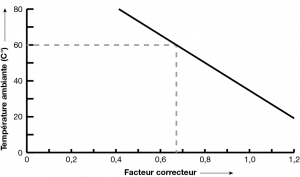
Exemple : un électro-aimant avec un facteur de marche de 25% utilisé à une température ambiante de 60°C a un facteur correcteur de 0,67.
Ainsi le facteur de marche devient 25% x 0,67 = 16,75%.
Temps de réponses :
Tout d’abord, ils définissent la durée de déplacement du noyau lors de l’attraction ou du retour. Les valeurs mentionnées (en ms) sont ainsi obtenues avec la tension nominale, en position horizontale, pour la course totale et avec une charge correspondante à 70% de la force magnétique. Par ailleurs, ces données sont indicatives et dépendent de nombreux critères.
CONDITIONS D’UTILISATION :
Alimentation en continu : 100%
La durée de mise sous tension est suffisamment longue pour que la température limite de l’électro-aimant soit presque atteinte. Pour ce type d’application choisir un facteur de marche FM 100%.
Voir le chapitre sur les cycles de fonctionnement et le facteur de marche.
Alimentation intermittente
Les durées de mise sous tension et de repos alternent en une succession de durées, régulières ou non. Les temps de repos permettent alors à la bobine de l’électro-aimant de se refroidir et de maintenir l’électro-aimant à un niveau de température acceptable.
Voir également le chapitre sur les cycles de fonctionnement et le facteur de marche.
Alimentation de courte durée
Les durées de mise sous tension sont suffisamment courtes pour que la température limite de la bobine de l’électro-aimant ne puisse pas être atteinte. Les repos entre chaque période d’alimentation sont assez longs pour que l’électro-aimant puisse suffisamment se refroidir.
Voir aussi le chapitre sur les cycles de fonctionnement et le facteur de marche.
Guidage du noyau
Lors de son déplacement le noyau glisse sur des guidages qui s’usent selon le nombre de manœuvres.
Le guidage du noyau peut être réalisé directement sur le corps de bobine ou à l’aide de bagues de glissement auto lubrifiées, PTFE ou bronze.
On distingue 3 catégories de longévité :
– limitée : environ 500 000 manœuvres
– moyenne : entre 1 et 10 millions de manœuvres
– élevée : supérieure à 10 millions de manœuvres
Cette indication est mentionnée sur le descriptif du produit. Ces estimations correspondent en revanche à un milieu ambiant propre (absence de poussière ou de graisse), une absence d’effort radial, une température ambiante située entre 1°C et 35°C et une hygrométrie relative inférieure à 50%.
TEMPÉRATURE :
Température ambiante V13 (°C)
Valeur moyenne des températures autour de l’électro-aimant.
Température de travail V23 (°C)
Température atteinte par la bobine de l’électro-aimant alimentée. L’échauffement de l’électro-aimant est provoqué par la mise sous tension de la bobine car elle se comporte également comme une résistante électrique produisant de la chaleur.
Température limite V21 (°C)
Température maximale admissible par la bobine d’électro-aimant. La classe d’isolation définie cette température (voir information ci-dessous).
Augmentation de température V32 (°C)
Différence de température entre la bobine de l’électro-aimant et la température ambiante. La mise sous tension de l’électro-aimant créé ainsi cette différence.
Une augmentation de température de +70°C est assez fréquente lorsque l’électro- aimant est utilisé à la limite de son facteur de marche (mais cette valeur n’est qu’indicative).
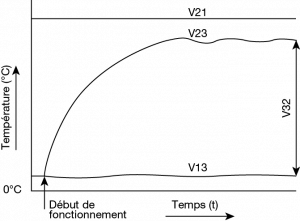
A noter que :
-V21 doit toujours être supérieur à V23
-V32 = V23-13
Classe d’isolation de la bobine
Le vernis du fil de cuivre de la bobine permet une isolation électrique entre les spires jointives de celle-ci. La classe d’isolation thermique, liée à ce vernis, indique ainsi la température maximale admissible par la bobine lors de son échauffement propre. Le choix de la classe d’isolation permet un bon fonctionnement de l’électro-aimant aux conditions de tension, de facteur de marche et de température ambiante définis ainsi pour l’appareil.
| Classe d’isolation | Température limite (°C) V21 | Échauffement maximum pour une température ambiante de 35°C |
| Y | 90 | 50 |
| A | 105 | 65 |
| E | 120 | 80 |
| B | 130 | 90 |
| F | 155 | 115 |
| H | 180 | 140 |
| C | 200 | >200 |
Température ambiante maximale de fonctionnement
Les limites de température ambiante d’utilisation sont souvent de -5°C à +35 °C (au-delà nous consulter car de nombreuses solutions existent). Le noyau connaît un risque de givre pouvant ainsi le bloquer en dessous de 0°C.
Important : la force de l’électro-aimant est liée au courant et par conséquent à la résistance de la bobine qui évolue avec la température.
CONDITIONS AMBIANTES DE TRAVAIL :
Température ambiante de fonctionnement :
Le facteur de marche FM correspond à une température ambiante jusqu’à +35°C (au delà nous consulter).
Humidité relative :
Le degré d’hygrométrie de l’air ambiant devra être inférieur à 50% lorsque la température ambiante est supérieure à 40°C. Tandis que pour des températures ambiantes inférieures à 40°C, un degré d’hygrométrie de l’air plus élevé sera admis (par exemple 90% d’humidité pour 20°C ambiant).
On doit aussi prendre en considération la condensation occasionnelle de l’eau dans l’air ambiant.
Conditions spéciales de fonctionnement:
Si les conditions normales de fonctionnement ne peuvent pas être respectées des solutions appropriées vous serons proposées, par exemple : une classe d’isolation supérieure, peinture spéciale, protections augmentées, etc.
Milieux ambiants extrêmes :
Les électro-aimants devront ainsi être protégés des atmosphères qui contiennent une grande quantité de poussières d’abrasion ou d’encrassement, des gaz corrosifs, etc.
Protection :
Protection des surfaces métalliques contre la corrosion : traitement galvanique.
La protection contre la pénétration de corps étrangers dans l’électro-aimant, liquide ou solide : normes CEI-IEC 60529 (code IP).

10 ans de succès pour la courroie agroalimentaire BRECOprotect®!
